
PROCESS CHEMOMETRICS
LABORATORY
@ CERES
RESEARCH
Automatic Controller Calibration via Bayesian Optimization
Automatic process control is essential to maintain process safety, reduce environmental impact and increase profit through decreased energy and
raw material consumption as well as reduced process variability. However, calibrating standard industrial feedback (and feedforward) control structures,
from simple PID controllers to advanced Model Predictive Control (MPC), for optimal performance is a difficult task in practice. Often, engineers resort
to manual tuning, involving either trial and error experiments or time consuming modeling experiments which may lead to high economic and engineering costs.
A highly desired feature for industrial controllers is automatic tuning (or autotuning), which comprises methods for calibrating controller parameters
automatically with limited human intervention. In this sense, a general controller autotuning problem can be posed as an optimization problem, where
controller parameters are optimized according to desired closed-loop performance metrics while respecting necessary constraints. Since the explicit algebraic relation
between closed-loop performance and controller parameters is usually unknown, the problem can be seen as a data-driven black-box derivative free optimization (DFO) problem,
where only input and output data are available.
Considering that each experiment is to be done on the physical process, sample efficient approaches are mandatory,
rendering standard DFO methods (i.e. evolutionary algorithms) inapplicable. In recent years, Bayesian Optimization (BO) has been empirically shown as a data-efficient DFO method
for global optimization of expensive and noisy black-box optimization problems, and has been applied to hyper-parameter tuning of machine learning models, simulation-based optimization and
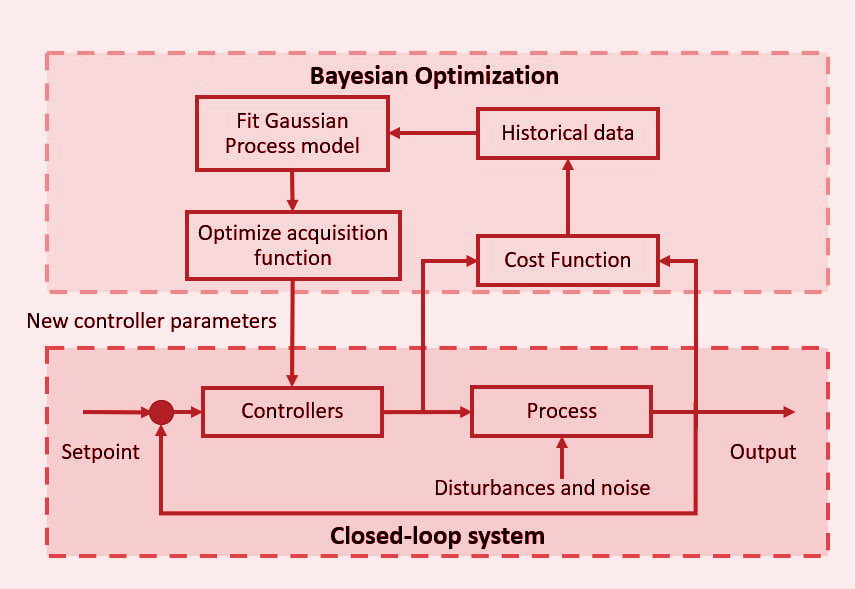
experimental design. BO is a class of surrogate-based DFO methods that rely on a Bayesian model (most commonly a Gaussian Process) as a surrogate (approximation) of the
underlying objective function and an auxiliary function that uses the surrogate prediction uncertainty to balance exploration (sampling unexplored regions of
the design space) with exploitation (optimizing given current knowledge) to guide the optimization search. Due to its properties, BO can be used as an efficient
method for autotuning of general controller structures through iterative closed-loop experiments, where at each iteration new controller parameters are suggested based
on measured input and output data from previous closed-loop experiments. In our group, we are aiming to improve the practical applicability of BO for controller autotuning
by making use of both BO algorithmic developments and traditional controller design methods. Several research directions are being pursued, including systematic methods
to define a relevant design space, improving sample efficiency by exploiting information from approximate models and more.
APPROACHES ALREADY DEVELOPED INCLUDE:
Systematic methods to define a relevant design space